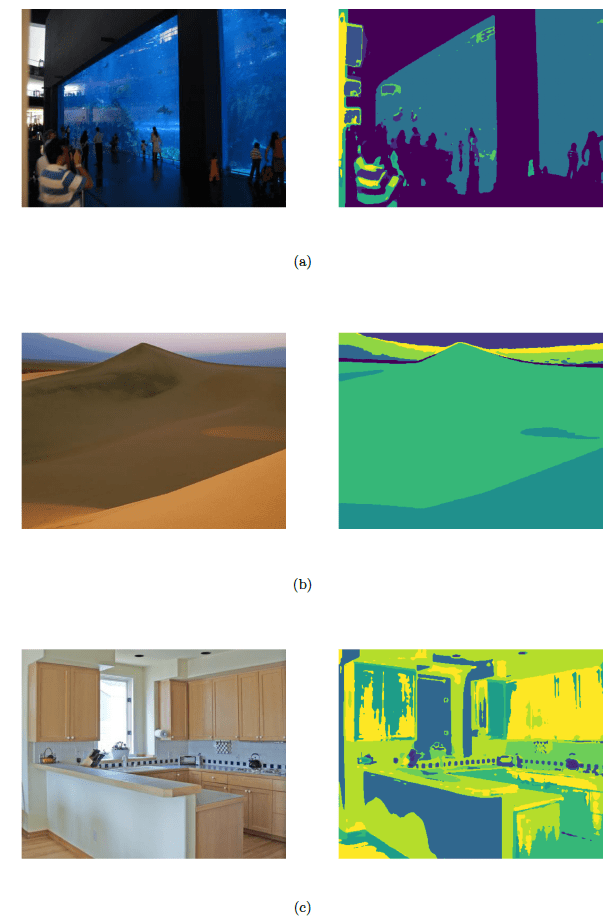
I built a scene classifier as part of the computer vision class at CMU. To achieve this, images of scenes are fed into the algorithm which then extracts features, puts them into clusters, and builds a dictionary 0f visual words.
The features are then clustered within each category to form a bag of visual words (BoW) which is then used to classify the scenes.