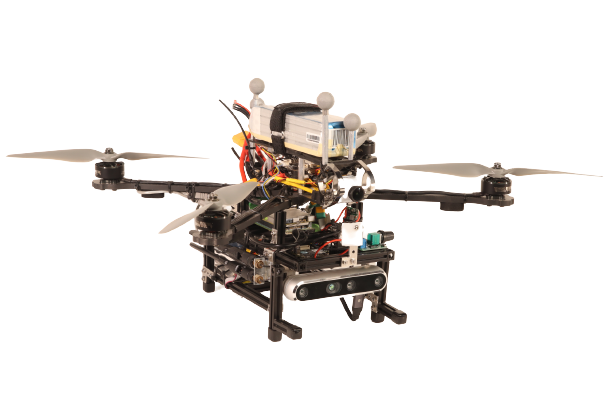
This quadrotor aerial system has dimensions of 0.6m x 0.3m x 0.3m and a mass of 2.5kg. The vehicle is equipped with a downward-facing mvBlueFox-MLC200wC color global shutter camera and Sunex DSL219D-650-F2.0 lens to estimate state. A forward-facing Intel Realsense D455 is used to estimate depth. Cree Xlamp XM-L2 High Power LEDs (Cool White 6500K) are mounted to the front and underneath the system to provide illumination for color camera images. The mvBlueFox operates at 60Hz and the Realsense D455 operates at 15Hz. The laser power of the IR projector on the D455 is increased from the default 150mW to 300mW to increase the depth accuracy in darkness.

The vehicle is equipped with two computers that communicate via Ethernet link: a Gigabyte Brix 8550U and an NVidia TX2 with a J120A Auvidea carrier board. The TX2 runs the mvBlueFox driver, communication to and from the Pixracer, state estimation, and control. The Gigabyte Brix runs adaptive teleoperation, collision avoidance, motion planning, and the Intel Realsense D455 driver. The drone frame is a Lumenier QAV-RXL 2 – 10″ FPV quadcopter frame. The ESC is an Aikon AK32 55A 3-6S BLHeli32 4-in-1 ESC and the motors are T-Motor F100 Cinematic KV1100 with 9” Advanced Precision Composites propellers. Teleoperation commands are sent via an RC Transmitter to a TBS Crossfire Micro RX V2 receiver.
The robot was used in multiple experiments indoors, outdoors, and in harsh underground environments https://youtu.be/7jgkBpVFIoE and https://youtu.be/VjyoPVXT8WY
This generation of robots provides multiple improvements over the previous robot used by the lab. Mainly:
| Feature | Old Generation | New Generation |
| Weight | 2.0kg | 2.4kg |
| Flight time | 5 mins | 10 mins |
| Depth info | D435 max. 3m | D455 max. 6m |
| Light Modulation | Fixed light intensity | Controllable light intensity |
| Modularity | Structures are interdependent and hard to access components without dismantling the whole payload | Mainframe, sensing, compute, and coms structures are independent and can be individually accessed with a max. of 2 screws |
| Neatness | Hard to recognize individual wires and connections, and redundancies | Neat, spacious, and intuitive mechanical design and electrical wirings |
| Mechanical Connections | Use of zipties and hot glue to hold components in place | Focus on mechanically securing components by the use of nuts and screws |
| Structural Integrity | Quadrotor frame and payload are held by a camera mount with non repeatable locking | Quadrotor frame and payload are securely mounted by 4 solid and repeatable screw connections |
