Step 1 – 3D Print the general structure

Step 2 – Assemble the steering mechanism
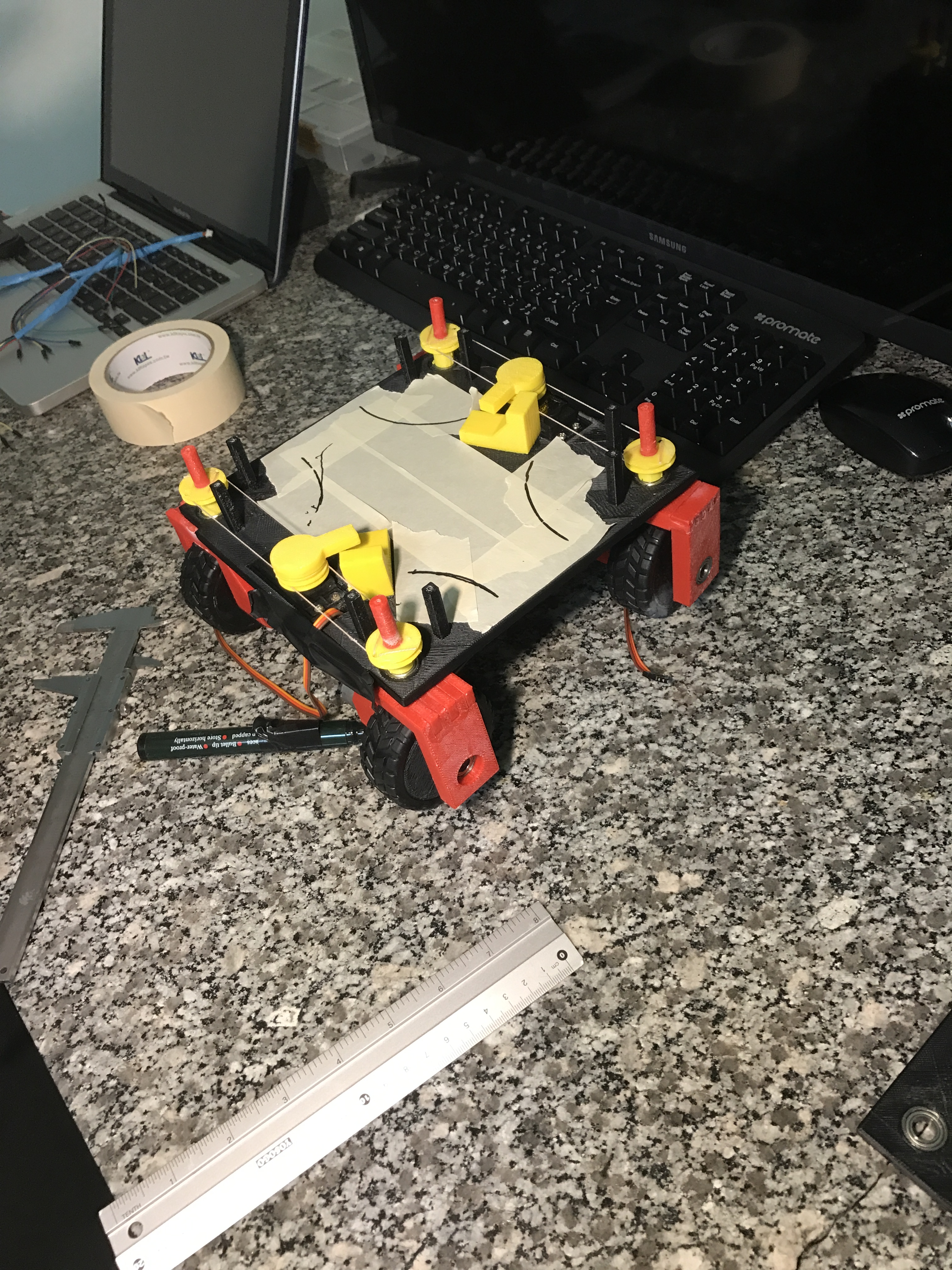
Step 3 – Wire the motors, sensors and power

Step 4 – Basic functionalities testing
Step 5 – Add the delivery mechanism

Step 6 – Last checks and calibration
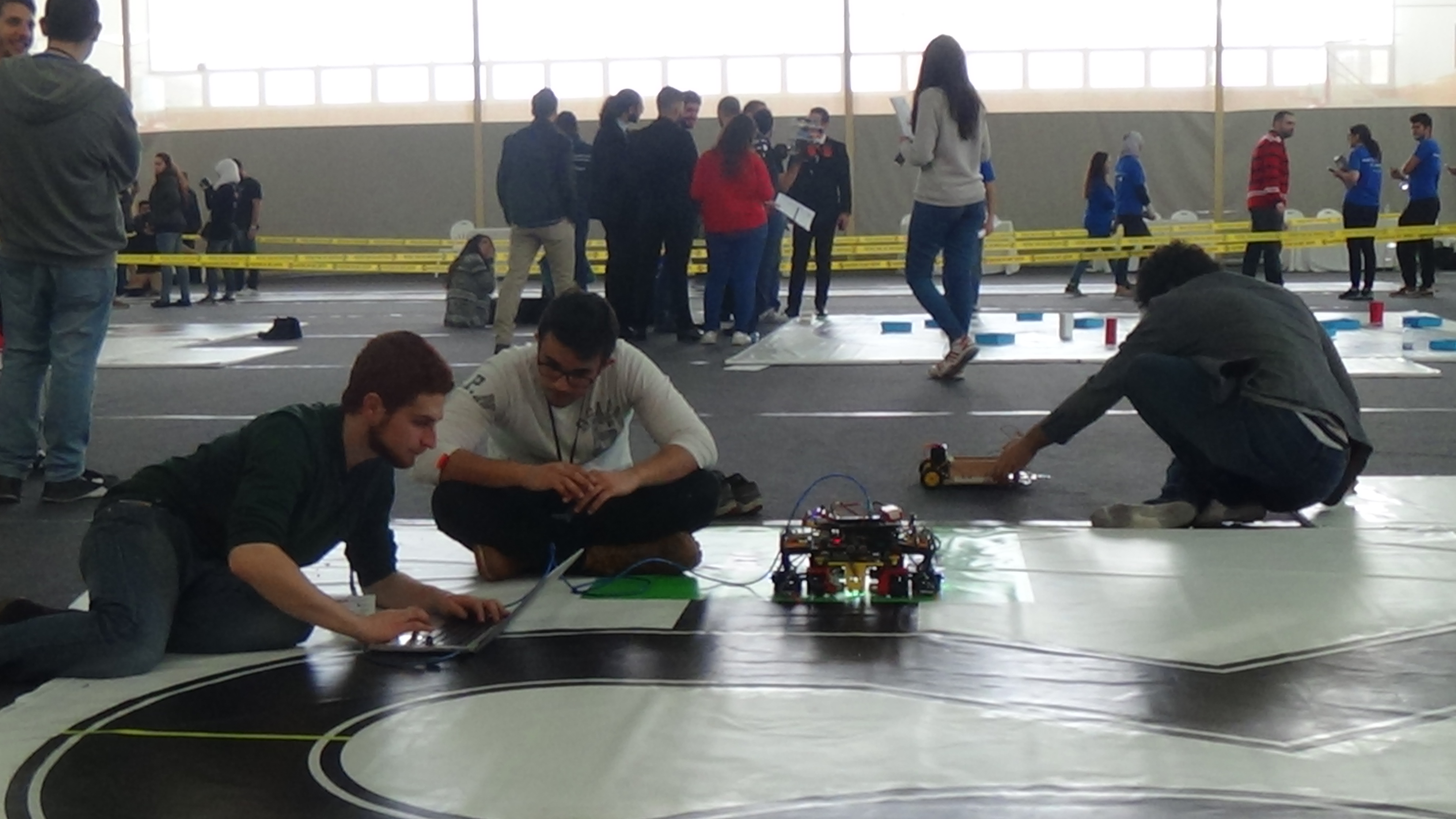
Step 7 – Competition day
Step 8 – Innovation Award

