Skip to content
Yves Daoud
Projects Portfolio
High Speed Quadrotor Flight
Human-Robot Exploration
Point Cloud Fusion
3D Photometric Stereo
Neural Network for Text Recognition
Object and Motion Tracking
3D Scene Reconstruction
Augmented Reality
Scene Classification
Autonomous Aerial Robot
Quadrotor with Suspended Load
Optimal Control of a Quadcopter
UAV Acoustic Localization
Obstacle-Free Space
3D Delta Robot
Model F1 Car
XY Plotter
Self-driving mobile robot
CaverBot
Retractable Roof
Concrete 3D Printer
Back
LinkedIn
Email
Youtube
RISLab
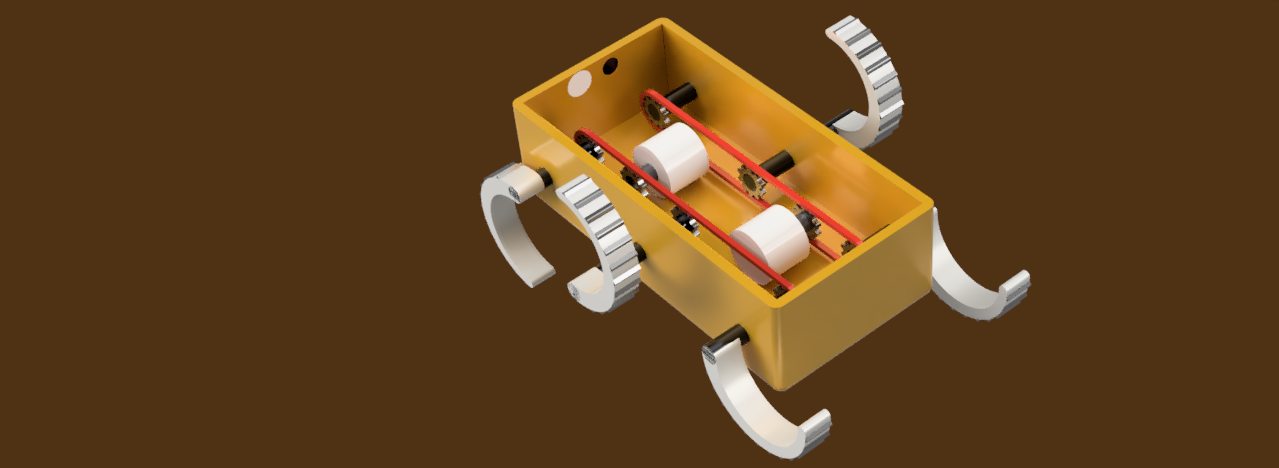
CaverBot
Posted by
Yves Daoud
January 13, 2019
September 1, 2022
Post navigation
Previous Post
Previous post:
Retractable Roof Mechanism using Shape Memory Alloy
Next Post
Next post:
Self-driving mobile robot – EDC 2.0
Reblog
Subscribe
Subscribed
Yves Daoud
Sign me up
Already have a WordPress.com account?
Log in now.
Yves Daoud
Subscribe
Subscribed
Sign up
Log in
Copy shortlink
Report this content
View post in Reader
Manage subscriptions
Collapse this bar
Loading Comments...
Write a Comment...
Email (Required)
Name (Required)
Website